
 online retailer,bulk & wholesale and OEM/ODM e-shop of motor and controller, Shenzhen weigena technology co., LTD")
Tag - carte driver moteur


10pcs/lot TB6560 3A Stepper Motor Driver Stepper Driver Board axis Current Controller 10 Files TB6560AHQ
US$0.00


Module de contrôle de vitesse de moteur pas à pas Carte de générateur de signal d'impulsion W312 - Descriptions: Matériau: Composants électriques Couleur: Voir les photos
US$0.00
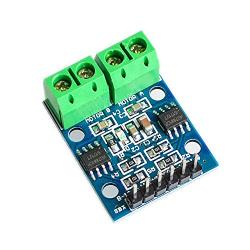
Carte de Contrôle Pilote de Moteur DC Double Moteur à Pas H-Pont HG7881
US$0.00
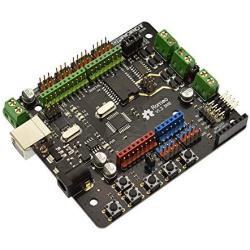
Romeo All in One Robot Controller Board
Romeo All in One Robot Controller Board
Features
..
US$0.00


Carte pilote moteur pas à pas Big Easy Driver Board V1.2 A4988 2A/Phase pour imprimante 3D - Caractéristiques : La Big Easy Driver, conçue par Brian Schmalz, est une carte pilote pour moteurs pas à pas bipolaire jusqu'à 2A/phase.
US$0.00
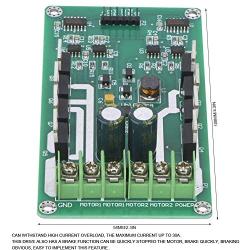

Module de commande à courant continu Dual DC Motor Driver Board, Pont H-Bridge DC 3~36V 10A Pic 30A Contrôle de Vitesse PWM Module, MOSFET IRF3205 Contrôle Réactif Rapide pour Arduino Robot Voiture Intelligente - Caractéristiques : Spécifications : Condition : 100% Neuf Forward Motor : DIR = 1 PWM = PWMMotor Reversal : DIR = 0 PWM = PWMParking Brake : DIR = X PWM = 0 (X est un état arbitraire) Connexions moteur et alimentation Énergie connectée à l'alimentation positive, GND alimentation négative.
US$0.00


Carte pilote de moteur pas à pas bi-polaire Big Easy de SparkFun, compatible avec les moteurs pas à pas bi-polaire jusqu'à 2A/phase maximum. Inclut un circuit de régulation sur puce Allegro A4988 5V/3.3V. Conçue par Brian Schmalz.
US$0.00


CUGUU 2pcs TB6600 4,5A Carte Pilote Moteur Pas à Pas Un Axe CNC - 1) Tension de fonctionnement DC 10V-45V.
US$0.00

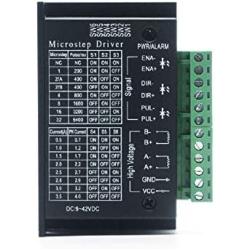
TB6600 4A 9-42V 32 Subdivision Stepper Motor Driver CNC:
This driver uses a 6-bit dial switch, ..
US$0.00
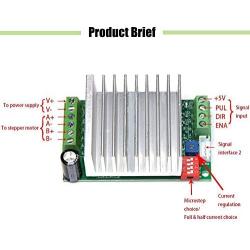

KOOBOOK 2Pcs 4.5A TB6600 TB6600HG Carte Pilote Moteur Pas à Pas – Remplace TB6560 – Caractéristiques : Sortie maximale nominale atteinte : ± 4.
US$0.00
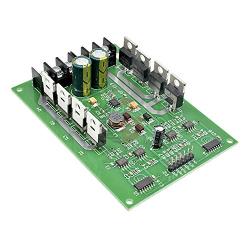

Carte pilote moteur DC à double CAN Dual DC Motor Driver Board H-Bridge PWM DC Motor Drive Module MOSFET IRF3205 12V 24V 10A Pico 30A avec Fonction de Freinage - Descriptions: Freinage parking : DIR = X PWM = 0 (X est un état arbitraire) Moteur avant : DIR = 1 PWM = PWM
US$0.00
Affichage de 1 à 11 sur 11 (1 pages)
